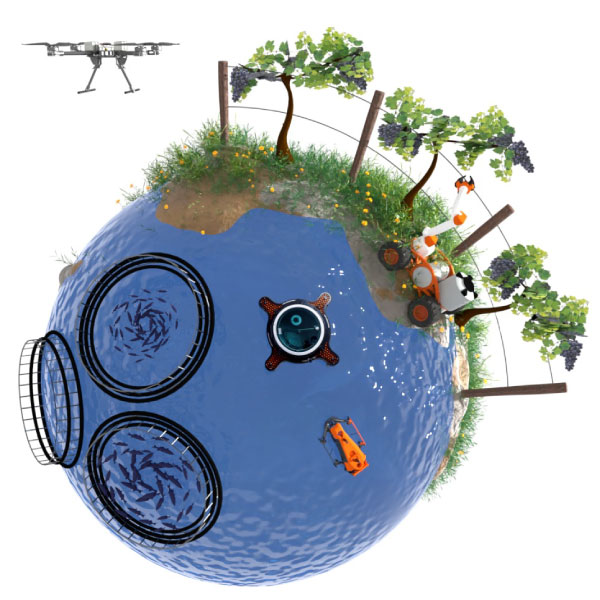
Remotely Operated Vehicle (ROV) Remotely Operated Vehicle shall be in interaction with nets.
Mobile robot - ViV Mobile robot with a robotic arm, sprinklers, compressors and sensors used for shoot thinning in the vineyard
Autonomous surface vehicle H2Omni-X Autonomous surface vehicle with a landing platform for UAVs and a ramp for the Remotely Operated Vehicle (ROV)
Fish farm cages Model of trends in the fish breeding population will be developed within the project
Vineyard Efficiency and adjustment of the system operation in real conditions in a vineyard will be tested
Unmanned aerial vehicle (UAV) UAV will be used for monitoring and screening vineyards and fish farm cages
HEKTOR is conceived as a modular and autonomous robotic system, adapted for various missions in viticulture and mariculture with the anticipated possibility of human intervention while performing various work, inspection and intervention tasks. The main objective of HEKTOR project is to provide a systematic solution for the coordination of smart heterogeneous robots/vehicles (marine, land and air) capable of autonomously collaborating and distributing tasks in open unstructured space/waters.
Name: Heterogeneous autonomous robotic system in viticulture and mariculture – HEKTOR
Coordinator: University of Zagreb Faculty of Electrical Engineering and Computing
Duration: 13/3/2020-31/3/2023 Budget: 5.794.060,14 HRK Financed by: ESI European Regional Development Fund
Partners: University of Dubrovnik - Institute for Marine and Coastal Research, University of Zagreb Faculty of Agriculture
The exploratory robot ViV was designed and constructed at The Laboratory for Robotics and Intelligent Control Systems. Its purpose is to autonomously move in various challenging environments, such as ruins or steep slopes.
Its well-designed drive provides it with effective mobility in challenging terrain (obstacles, stairs), as well as the ability to transport heavy loads, even of the weight of an adult human. The robot is equipped with multiple sensors, and its design allows it to function in explosive and dangerous environments.
Unmanned Aerial Vehicle (UAV) is a quadcopter equipped with RTK-GPS system, RGB and thermal cameras, LIDAR, force sensor and on-board computer for real-time data processing and storage. UAV has extended flight time and it is capable of executing autonomus take-off and landing procedures on rough terrain or on Unmanned Surface Vehicle.
Vehicle applications: • Aerial vineyard and fish farms monitoring • Terrain mapping • Data colecting for point colud generation • Data acquisition for ground and underwater robots • Flying platform for robot manipulators
The autonomous surface platform (ASV) is over-actuated with 4 thrusters forming the ”X” configuration. This configuration enables symmetrical motion in the horizontal plane under any orientation. The platform has been developed at the University of Zagreb Faculty of Electrical Engineering and Computing, Laboratory for Underwater Systems and Technologies. The platform was primarily developed for dynamic positioning and diver following and since then its application was extended to execution of multiple autonomous tasks.
Vehicle applications: • Control algorithm testing • Multivehicle cooperative control • Diver tracking • Diver communication and navigation • Sensor calibration and navigation algorithm testing
Autonomous vehicle BUDDY (AUV) was developed specifically for the purpose of exploring human-robot interaction in the underwater environment. It is fully actuated in the horizontal plane and can independently control heave and pitch degree of freedom. The vehicle is equipped with a wide range of sensors required to achieve envisioned functionalities in the underwater environment. BUDDY is 1.27 m long, 0.7 m wide, 0.7 m high and weighs about 70 kg. The basic payload includes: • U-blox Neo 5M GPS • Microstrain GX3 intertial measurement Unit (IMU) • LinkQuest Navquest 600M Doppler velocity logger (DVL) • Ubiquiti wireless communication • 48 V lithium battery • VideoRay Pro4 brushless thrusters
In addition, the vehicle is equipped with acoustic, stereo and mono cameras. Visual interaction with the diver is achieved through an underwater tablet, mounted in front, capable of displaying messages and alerting the diver when necessary. The vehicle is also equipped with an ARIS multibeam sonar, pointing to the front, which is used to determine diver position when in the vicinity of BUDDY.
Dario Stuhne and Ivan Hrabar participated in the international workshop “From MVP to first customers”, which was held in the Ljubljana University Incubator from 23rd... Read More
The HEKTOR project at the International Fair of Agriculture, Agricultural Equipment and Machinery CroAGRO 2022, which will be held from December 1 to 4, 2022,... Read More
Project HEKTOR will be presented at Zagreb VINOcom 2022 (Zagreb International Wine and Culinary Festival). The festival will be held form 27th until 28th of... Read More
As a part of project Caliper an interview was published with Marina Anić. The goal of the interview is to promote horizontal principles, equality, and... Read More
As a part of project Caliper an interview was published with Antonia Kurtela Pavlić. The goal of the interview is to promote horizontal principles, equality,... Read More
In the show Scientific circles an autonomous all-terrain mobile manipulator was presented by project HEKTOR. Members of the HEKTOR project, Prof. Dr. Sc. Zdenko Kovačić, Ivan Hrabar, Ivo... Read More
Article titled Biofouling Estimation in Mariculture and A Marine Robotic Simulator was accepted for OCEANS 2022 Hampton Roads conference that will be held from 17th... Read More
Dario Stuhne, Jelena Vuletić and Filip Zorić attended the International Conference on Smart Systems and Technologies (SST) which was held from 19th – 20th of... Read More