
HEKTOR u Ljubljani
Dario Stuhne i Ivan Hrabar sudjelovali su na međunarodnoj radionici „Od MVP-a do prvih kupaca“ koja je održana u Ljubljanskom sveučilišnom inkubatoru od 23. siječnja... Read More

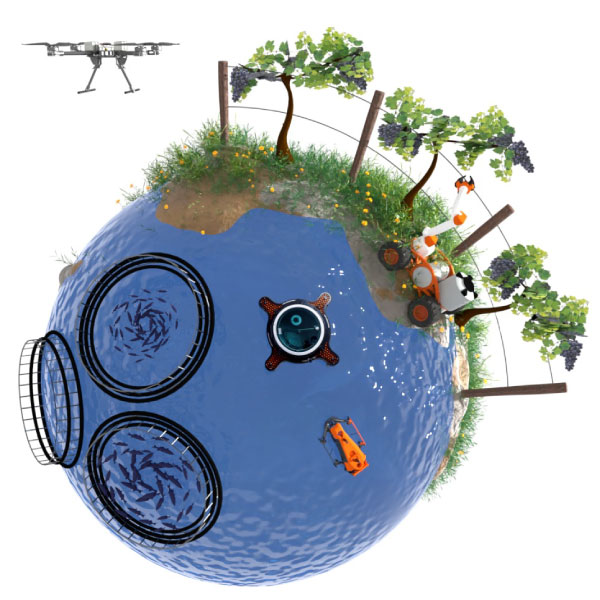
HEKTOR je zamišljen kao modularan i autonoman robotski sustav, prilagođen za različite misije u vinogradarstvu i marikulturi s predviđenom mogućnošću intervencije čovjeka tijekom obavljanja različitih radnih, inspekcijskih i interventnih zadataka. Glavni cilj projekta HEKTOR je ostvariti sustavno rješenje za koordinaciju pametnih heterogenih robota/vozila (morskih, kopnenih i zračnih) koji su u stanju autonomno surađivati i međusobno raspodjeljivati zadatke u otvorenom nestrukturiranom prostoru/akvatoriju.
Naziv: Heterogeni autonomni robotski sustav u vinogradarstvu i marikulturi – HEKTOR
Koordinator: Sveučilišta u Zagrebu Fakultet elektrotehnike i računarstva
Trajanje: 13/3/2020-31/3/2023
Vrijednost projekta: 5.794.060,14 HRK
Izvor financiranja: ESI Europski fond za regionalni razvoj
Partneri: Sveučilište u Dubrovniku – Institut za more i priobalje, Sveučilište u Zagrebu Agronomski fakultet

Istraživački robot VIV je dizajniran i konstruiran u Laboratorij za robotiku i inteligentne sustave upravljanja. Razvijen je s ciljem autonomnog kretanja u različitim zahtjevnim okruženjima (ruševine, veliki nagibi).
Kvalitetnim pogonskim sklopom omogućena je velika pokretljivost robota (savladavanje prepreka i stepenica), kao i prenošenje tereta, čak i težine odraslog čovjeka. Robot je opremljen raznim senzorima te svojim dizajnom omogućuje rad u eksplozivnim i opasnim atmosferama.

Bespilotna letjelica opremljena je sa RTK-GPS sustavom za navođenje, RGB i termalnom kamerom, LIDAR-om, senzorom sile te ugradbenim računalom za obradu podataka sa senzora u stvarnom vremenu i njihovu pohranu. Bespilotna letjelica ima osigurano duže vrijeme leta te mogućnost autonomnog polijetanja i slijetanja na neravan teren ili na autonomno površinsko plovilo.
Namjena bespilotne letjelice:
• nadzor vinograda i ribogojilišta iz zraka
• mapiranje terena
• prikupljanje podataka za generiranje oblaka točaka u istraživanom području
• snimanje podataka sa senzora i njihovo slanje mobilnim roboima na zemlji i u moru
• leteća platforma za robotski manipulator

Autonomna površinska platforma (ASV) je preaktuirana sa 4 potisnika koji formiraju “X” konfiguraciju. Ovakva konfiguracija omogućava simetrično gibanje u horizontalnoj ravnini pri bilo kojoj orijentaciji. Platforma je primarno bila razvijena za dinamičko pozicioniranje i praćenje ronioca, ali je oblast njene primjene proširena na mnoge autonomne zadatke. Primjene ASV-a:
• testiranje upravljačkih algoritama
• kooperativno upravljanje više vozila
• praćenje ronioca
• kartiranje morskoga dna – batimetrijska snimanja
• kalibracija senzora I testiranje algoritama navigacije

Autonomna ronilica BUDDY potpuno je aktuirana u horizontalnoj ravnini te može neovisno upravljati poniranjem i kutem nagiba. Vozilo je opremljeno širokim spektrom senzora neophodnih za postizanje zamišljenih funkcionalnosti u podmorju. BUDDY je dug 1.27m, širok 0.7m, visok 0.7m, i teži 70kg. Osnovna oprema uključuje:
• U-blox Neo 5M GPS
• Microstrain GX3 inercijalna mjerna jedinica (IMU)
• LinkQuest Navquest 600M Doppler velocity logger (DVL)
• Ubiquiti bežična komunikacija
• 48 V litijska baterija
• VideoRay Pro4 brushless potisnici
Osim toga, vozilo je opremljeno i akustičkim senzorima, te mono i stereo kamerama. Interakcija s roniocem je omogućena podvodnm tabletom koji se nalazi na prednjem dijelu vozila, a koji prikazuje poruke i upozorava ronioca kada je to potrebno. BUDDY je također opremljen i višezračnim sonarom ARIS koji je okrenut prema naprijed i koristi se za interpretaciju okruženja i/ili određivanje pozicije ronioca kada je u blizini vozila.







